
2021 Summer Hardware Product Design Intern. Owned redesign of a product from pen-paper ideation all the way to injection mold tooling kickoff. Engaged in DFM, thermal architecture design, IP rated dust/water proofing, 2D drawing creation, and mechatronic integration.
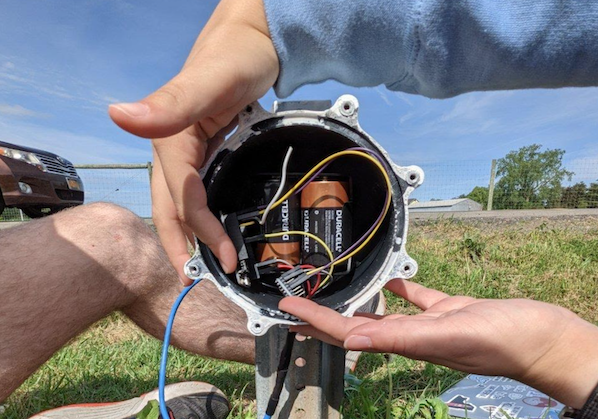
Worked with the NY Tompkins County Highway Department to implement device to improve road weather monitoring. Designed a waterproof, IoT data collection device with subsurface temperature probes, and installed the system on Game Farm Road in Ithaca, NY.
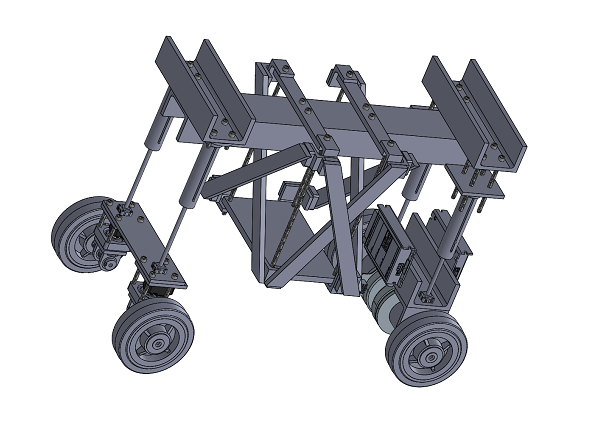
Worked on a team of 7 on a human centered design project, focused on solving the problems of food workers in a post-COVID world. We conducted over 20 user interviews to identify pain points, ultimately deciding to design an automatic table cleaning mechatronic system. I was in charge of leading the mechanical design for the product.
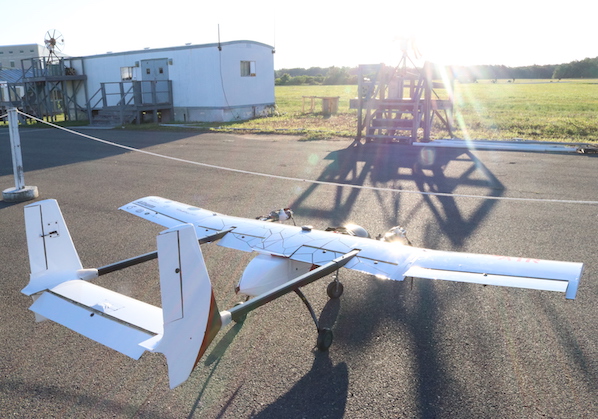
Helped design a fixed wing aircraft capable of autonomous flight, image capture and classification, unmanned vehicle deployment, and more on Cornell CUAir. Designed & fabricated a closed loop system that would allow
the plane to autonomously zoom the SONY R10C to a desired resolution.
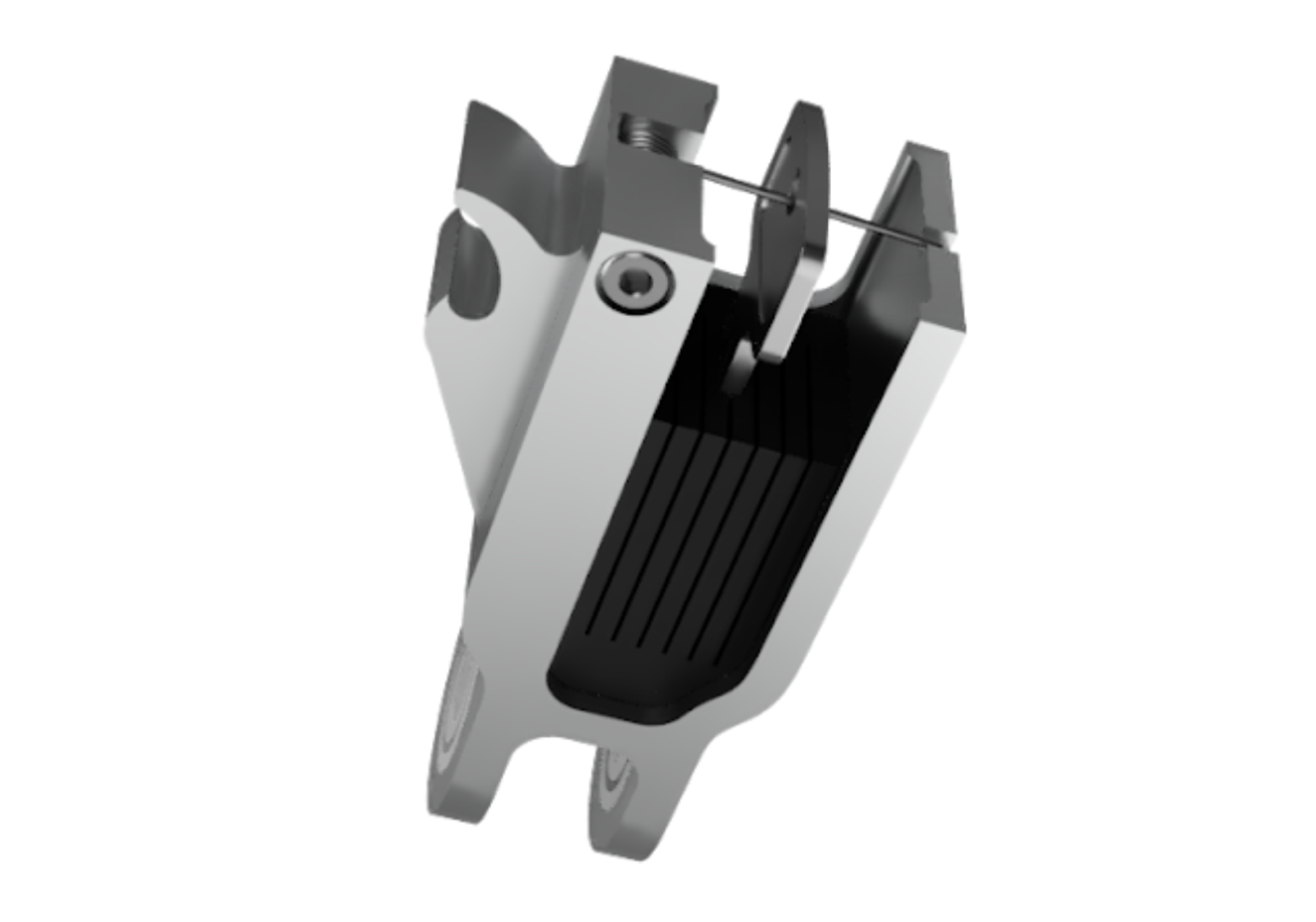
DFM/DFA and FEA of machined, aluminum Keyholder. Unique design prevents keys from making noise, allows for easy key access, and protects keys from falls.

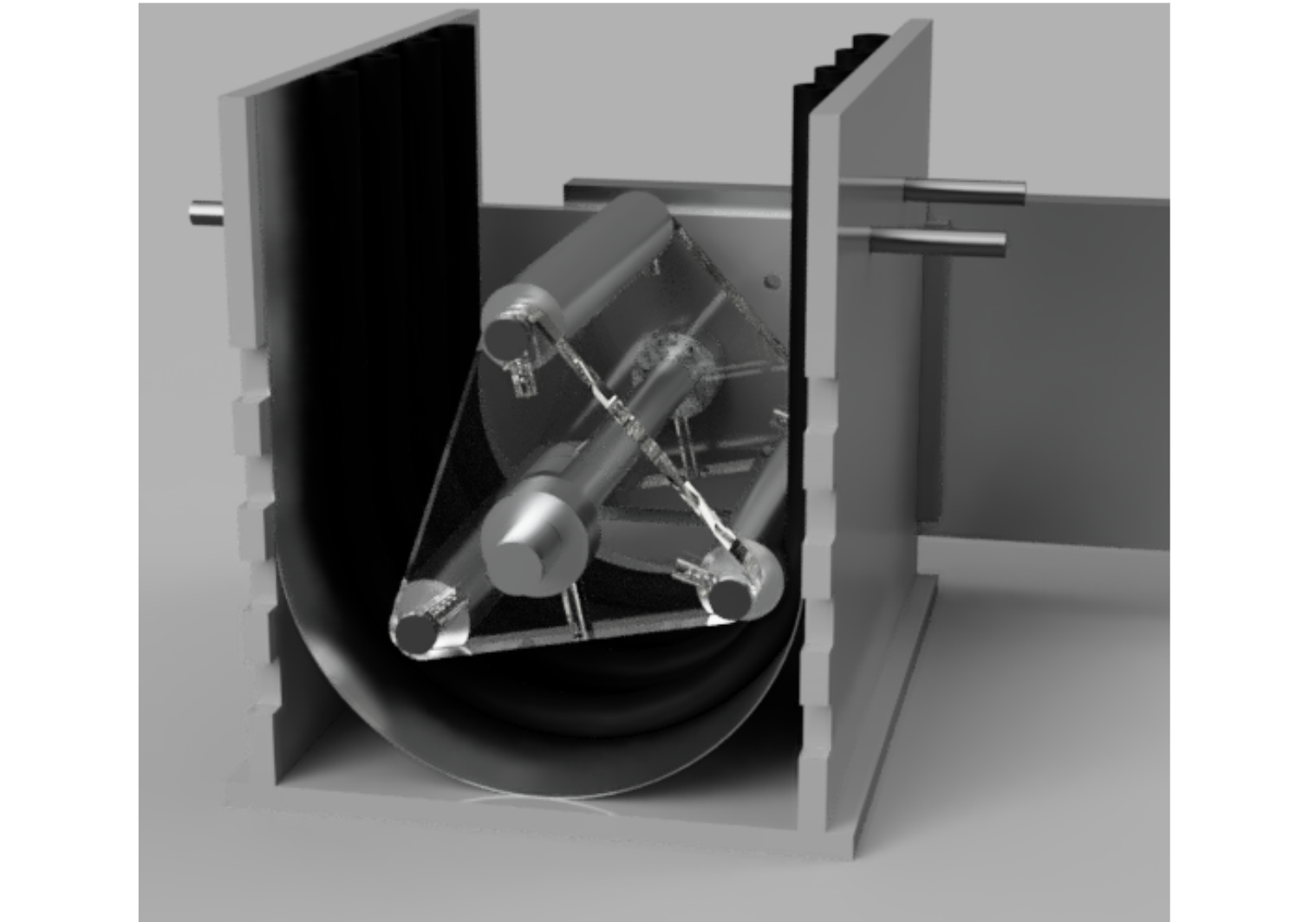
Mechanical, electrical, and software design of a gimbal for videography @ Cornell MakerLab.
Capable of camera stabilization and real-time object detection & tracking.
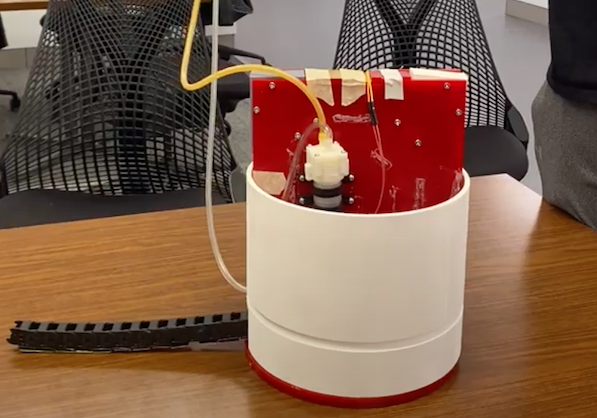
Designed a peristaltic pump that used spring mounted rollers to provide just enough force to the tube to pump liquid while simultaneously minimizing any friction between the rollers and the tube.
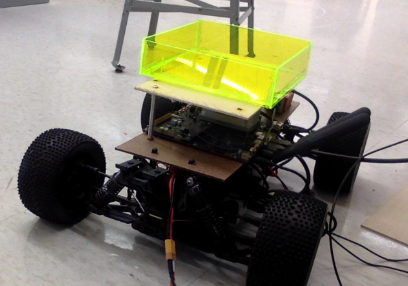
Reverse-engineering of car-prototype robot at McGill University's Centre for Intelligent Machines Lab. Developed a computer aided design & electrical schematic for the robot and debugged the arduino code used for control & feedback.
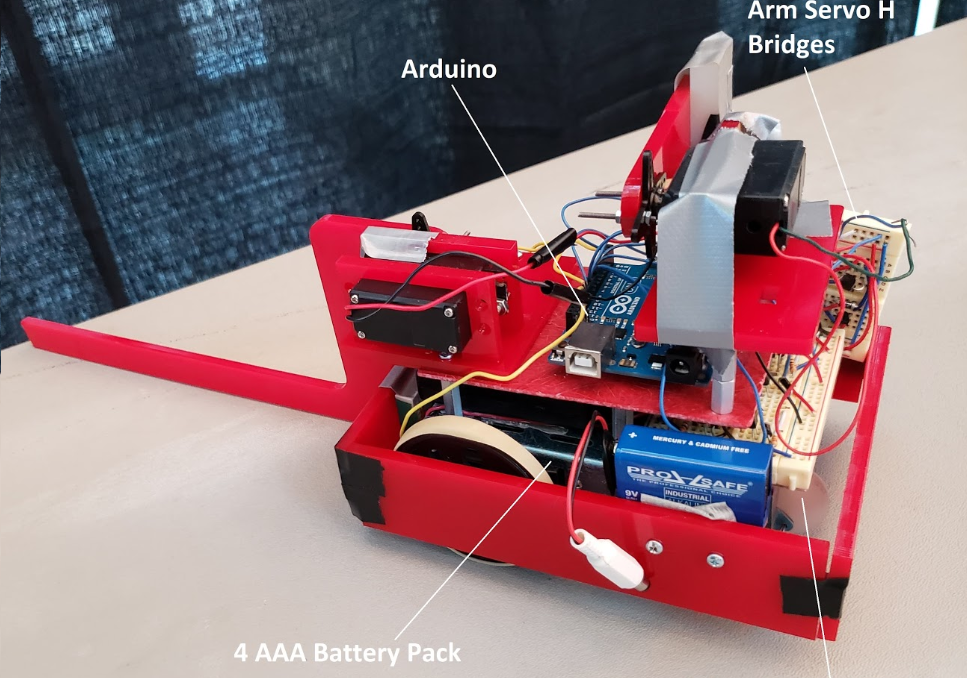
A Mechatronics class project. Used C and Atmel Studio to program an autonomous robot capable of retrieving blocks in a 1v1 robot competition. Our robot won four out of five matches in our competition bracket.
TJNav: a robot that used Robot Operating System’s SLAM gmapping packages to map out a room at my high school.
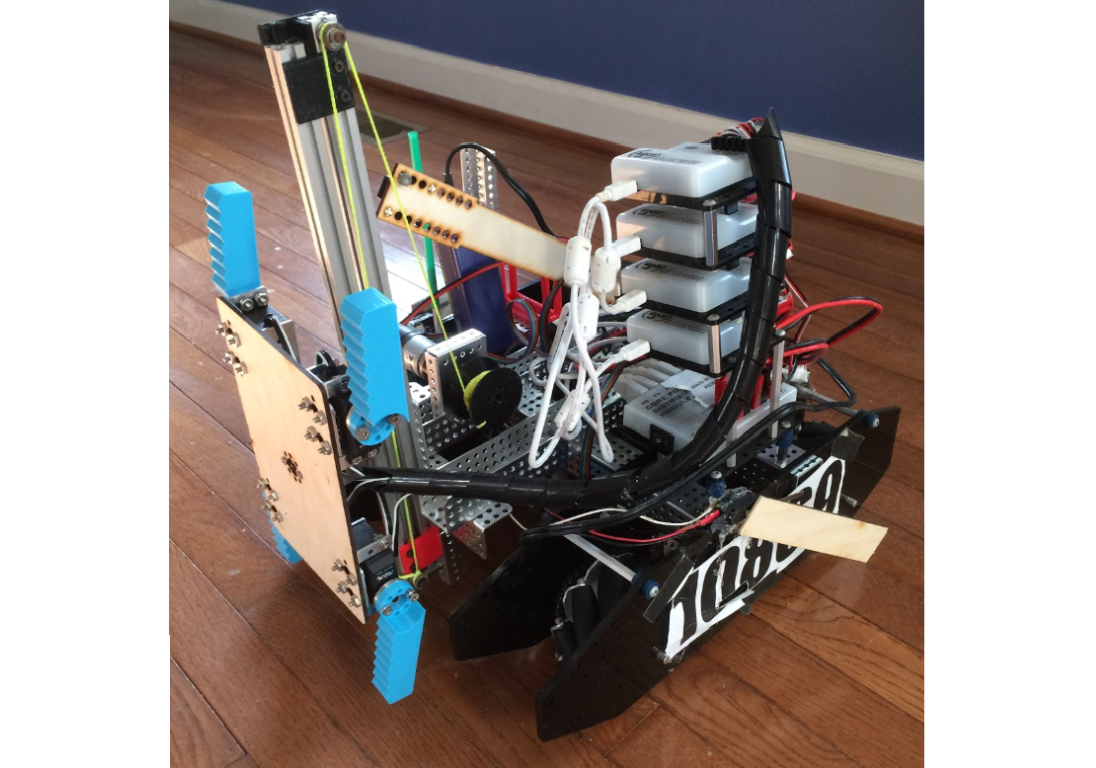
Worked on building FTC robots for 3 competition years during high school. Designed with a custom mecanum wheel chassis made with lasercut acrylic, a linear slide arm, a four-servo block grabbing mechanism, and more.
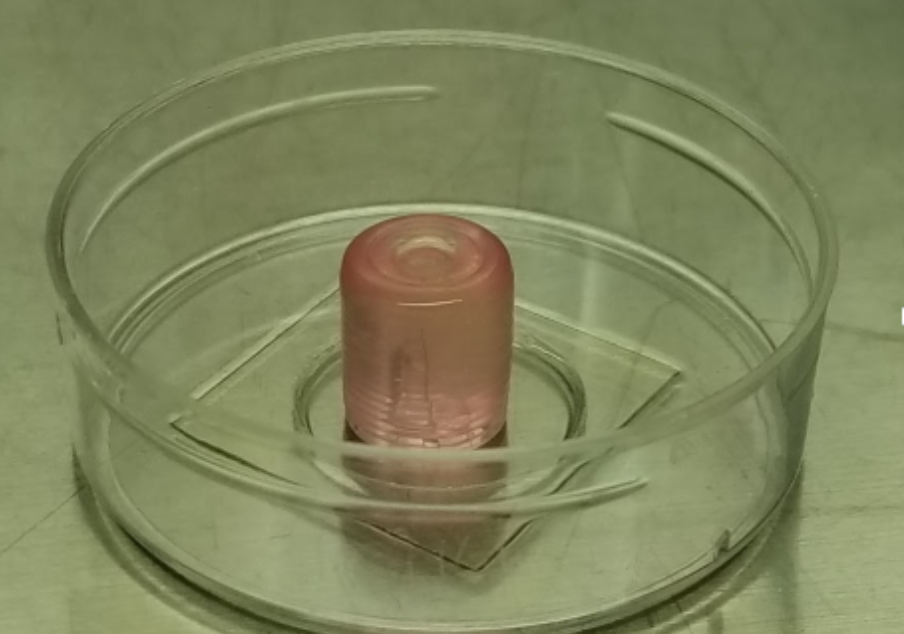
Worked on development of optimal bioink solution for bioprinting applications in high-throughput drug screening. Examined a tradeoff between image quality and cell viability depending on the concentration of solution.
